搜索结果:找到 “关键字” 相关内容 8个, 当前显示 10 条,共 1 页
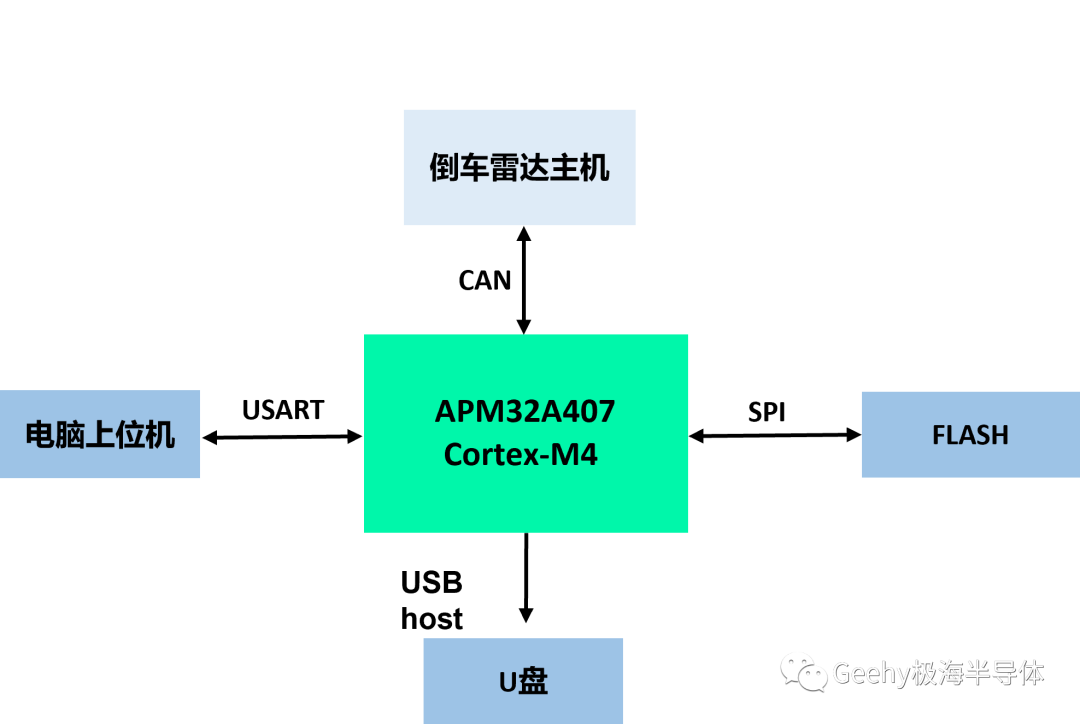
倒车雷达记录仪一般由主控芯片、倒车雷达传感器、超声波发射/接收电路、报警电路、显示电路等部分组成。极海推出的倒车雷达记录仪应用方案,基于高性能、低功耗、高可靠的APM32A407系列车规级MCU设计,结合超声波测距可实现丰富、强大且方便实用的倒车雷达记录功能。
该设计运用三星公司的S3C2440,结合ICRoute公司的高性能语音识别芯片LD3320,进行了语音识别系统的硬件和软件设计。在嵌入式Linux操作系统下,运用多进程机制完成了对语音识别芯片、超声波测距和云台的控制,并将语音识别技术应用于多角度超声波测距系统中。
本文提出了一种基于AT89C2051组建单片机倒车防撞系统的设计方案,该方案主要是利用超声波的特点和优势,将超声波测距系统和AT89C2051单片机结合于一体,设计出一种基于AT89C2051单片机的倒车防撞报警系统。
随着社会的进步和发展,人们的学习、工作越来越繁忙,于是怎样更大程度地将人们从烦琐的日常事物中解脱出来,就成了新一代家电所追求的目标。而智能化正是这一目标的集中体现。本文介绍的智能吸尘器初步实现了无人情况下的自主工作方式,很大程度地提高了产品的自动化水平。1总体原理该智能吸尘器利用了超声波测距的原理,通过向前进方向发射超声波脉冲,并接收相应的返回声波脉冲,对障碍物进行判断;通过以单片机为核心的控制器
介绍一种基于MSP430F2274单片机为核心的智能小车。小车采用超声波测距技术实现自动避障,同时通过语音模块来播报出小车与障碍物的距离。为了使测距不受温度影响,用温度传感器实时检测小车周围环境的温度并修正距离计算公式的参数,采用光电编码器来检测小车的速度,运用PID控制算法和PWM来控制小车的精确稳定的运行,从而达到预期的设计目标。
本文提出的可视倒车装置硬件电路框图如图1所示,主要由Intel嵌入式处理器PXA270、视频采集、超声波测距等电路组成。两对超声波换能器、信号调理电路和微控制器完成对障碍物的距离测定,并通过LIN总线发送至车内主系统;摄像头采集到的视频复合信号通过同轴电缆送至视频解码芯片进行A/D转换,并产生YUV422格式的视频信号输入PXA270的快速捕捉摄像头接口;主系统处理器利用字符叠加技术,在TFTLC
由于电子技术的发展,先后出现了$激光测距、微波雷达测距、超声波测距及红外线测距。其中激光测距是靠激光束照射在前车上的反射镜(汽车尾部)反射回来的激光束探测两车距离。
目前导盲器的研究较多,本实验提出的设计方案特点是以太阳能作为系统的动力来源,采用半导体数字温度传感器实现对单片机超声波测距系统的温度测量和补偿,从而对声速进行补偿,对引起测量误差的因素进行修正处理,可以提高导盲器的导盲精度及灵敏度。由于预留了单片机引脚,便于进行功能拓展,同时导盲器系统以模块化进行组装,适宜增加其他功能模块。例如可以添加GPS定位器,可以帮助盲人家属及时了解盲人的行踪,避免盲人走失