



一种新型前端PWM整流的标准整流逆变控制技术
摘要: 本文提出一种新型前端PWM 整流的标准整流逆变控制技术系统, 以实现解耦之间的转换与直流电容在不平衡负载下连结三相逆变器, 针对前端控制的整流器在不平衡负载的影响分析, 在此基础上设计和使用了电压电流环回路, 制止2 次谐波分量的直流电压反馈, 对整流器和逆变器的输入电流进行过滤, 使其不破坏动态响应的直流母线电压。通过仿真和实验结果有效地证明了本文所提出的新型控制技术。
关键字: PWM前端控制整流, 直流电压, 功率因数, 整流器
PWM前端控制整流由于具有直流电压的变化,输入功率因数校正( PFC) 和输入电流谐波控制的能力等优点, 被广泛用于三相交直交电压系统。由前端整流器、直流电容, 以及逆变器组成的三相交直交电压系统广泛用于在线式U PS .基于DSP 控制的在线式UPS 的结构图如图1 所示。
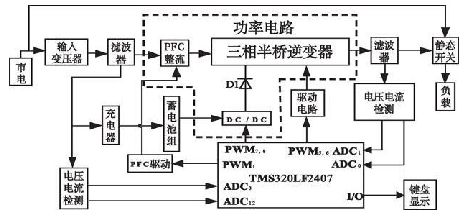
图1 基于DSP 控制的在线式UPS 的结构图
图1 中, 主电路由输入变压器、输入滤波电路、电压和电流检测电路、蓄电池、功率电路、输出滤波电路和静态开关等组成。其中功率电路包括三个部分, 即输入的PFC、三相全桥逆变器、DC/ DC 部分。电路信号采用TMS320C2812 控制。该控制器是T I 软件公司开发的, 可方便地进行汇编, 执行控制程序和错误检查。一般PFC 升压整流控制器通常有两个反馈回路,外部电压环路和内在电流环路。电压调节器产生电流控制的d 轴电流, 而在q 轴电流控制是零的单位功率因数, 其控制如图2 所示。
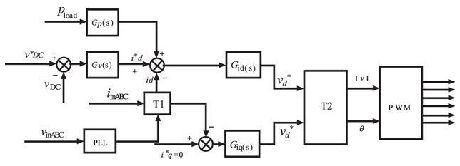
图2 带负载功率反馈的传统PWM控制系统
在正常工作条件下, 稳压器输出稳定的直流母线电压和d 轴电流控制, 但是逆变器负荷不均衡, 就会产生波动的直流电压, 因此整流器在不平衡负载下会造成前端总谐波失真( THD) 的输入电流。
相关研究表明直流电压滤波问题所造成的原因是由于不平衡的逆变器的负载电流和不平衡的输入电压造成的, 然而, 他们的控制目标不是提高电能质量的投入, 而是尽量减少直流环节电压。
一些研究人员已用开关函数概念的电力转换器,显示存在的谐波直流母线电压。本文将用这些已量化的工程来处理谐波波动问题, 仿真和实验结果将有效地证明本文提出的新型控制技术。
2 系统分析
一个标准的基于DSP 控制在线式UPS 系统如图3 所示。系统由推动型的前端整流器、直流链接、电压源逆变器构成。这两个功率转换器使用标准的空间矢量PWM 控制, 产生快速电压调节与总谐波失真最小化控制逆变器。

图3 基于DSP 控制的三相整流逆变控制系统模型
影响负载平衡分析如下。该逆变器的输入:
式中, SA , S B 和SC 是交换功能的交换机顶端的三个逆变器的开关, 如下:

扩大这些功能交换, 假设标准正弦相位电流如下:

式中, A K是k 阶的组成部分。AK ≡0 的所有三角变换后, 可以得出:

式中, I inv0是直流分量的逆变器输入电流; I invn 是n 阶部分的电流。通过公式( 4) 可看到, I outA = I outB = I outC和ΦA= ΦB= ΦC , 同时有I invn = 0, 如果n> 0 三相负载电流是平衡的。否则, 交流成分存在会造成连锁反应。
由公式( 4) 可以得出, 考虑到固定的三相电流, I inv0 仅正比A 1 , I inv2是一个关于A 1的线性组合, A3 I inv4 和A3A5是一个线性组合, 等等。在低频率范围内, 由于Ak ≡0 所以I inv0= 0.
根据标准空间矢量PWM , 各次谐波的算法:

式中, q= 0, 1, 2, ……∝;ω m 是调制频率; ωc 是载波频率; ωm ≤ωc , a是调制指数; J v ( z) 是第一类Bessel 函数。公式( 5) 只适用于频率范围远远低于载波频率, 此时在一次波段的载波频率可以忽略不计。在本文的系统研究中, m / c= 1/ 90 适用于规定计算, 并假设调制指数:
A1 = 1, A 3= 1. 142 ×10 -4 , A 5= 3. 020 ×10- 8.
二次谐波会导致不平衡的前端三相输入电流。抑制二次谐波直流电压, 不会解决当前不平衡的问题, 因为目前仍然是不稳定的控制策略, 提出了要消除失控,但有第二次谐波分量和反馈。
3 控制策略
在电源应用中, 基本逆变器输出的标准电压频率是50 Hz, 但直流母线谐波必须是两次, 可设计以制止数字带阻滤波器与已知谐波频率。在数字滤波器中,便以2n 的低层和高层截止频率ω1 和ω2 来设计, 使用MAT ALAB 仿真。
离散时间滑模控制器( DSMC) , 其中已被更为有效证明是用于内部电流环。DSMC 仿真的描述如下。
在整流电路包括输入电感如图3 可以作为一个模式LTI 系统和代表的状态空间。在离散时间, 该系统可以被描述如下:
式中, 输入电流i in ; 整流控制电压v pw m; 输入电源电压vin 都代表参加同步dq 参照系数, A i, Bi 和Ei, 为系统确定的电路参数。鉴于当前的逆变命令i ref ( k) ,DSMC 仿真相当于控制式如下:
直流母线电压和PWM 技术可以用来确定整流控制电压限制速度, 可以得到的实际控制电压公式:

4 仿真结果
为了直观地比较传统和本文提出控制技术, 在不平衡的负载下分别建立了不同的模型。不良的负序分量的输入电流已接近消除, 输入电流总谐波失真也会减少。这一结果意味着, 解耦之间的逆变器和整流器实现了在不平衡负载输入电流直流环节。图4 和图5显示不同的动态性能之间的控制器与谐波补偿的研究。通过比较, 可以得知, 传统的控制技术存在不平衡的三相输入电流和低失真, 本文的控制技术是稳定的。
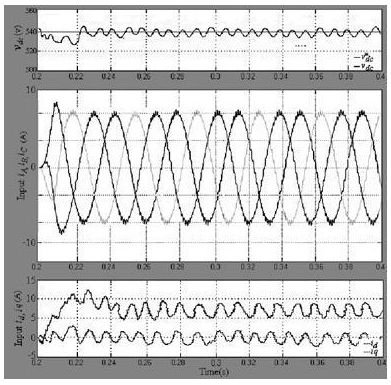
图4 传统控制策略的仿真结果
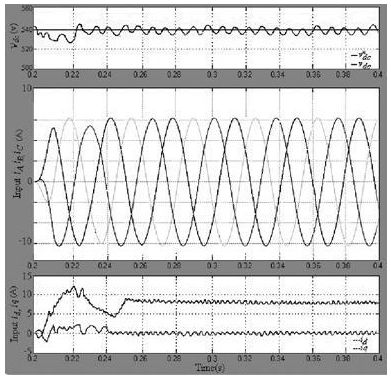
图5 新型控制策略的仿真结果
5 实验结果
基于两个数字控制器T MS320C2812 DSP 控制整流器和逆变器, 分别在图3 使用相同的负载进行模拟实验。图6为在线收集的稳态下的直流电测量值和筛选值。显然, 直接测量Udc为代表的100 Hz 组成部分得到显着抑制, 由四阶滤波器证明了这一瞬态测试。
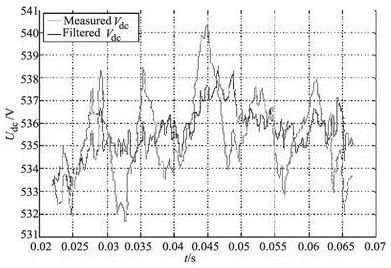
图6 测量Udc过滤Udc的实验结果
做以上重复的模拟实验, 其结果如图7 和图8 所示。
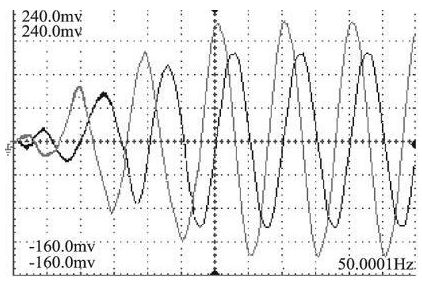
图7 传统iinAB相的实验结果
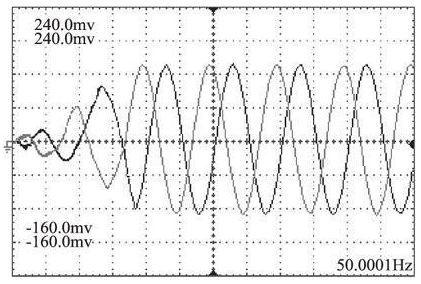
图8 新型iinAB相的实验结果
可以看出, 本文提出的控制技术提高了平衡的三相输入电流, 相似的波形如图4 和图5 的仿真结果。
6 结论
本文提出一种新型前端PWM 整流的标准整流逆变控制技术系统, 以实现解耦之间的转换与直流电容在不平衡负载下连结三相逆变器, 针对前端控制的整流器在不平衡负载的影响分析, 在此基础上设计和使用了电压电流环回路, 制止2 次谐波分量的直流电压反馈, 对整流器和逆变器的输入电流进行过滤, 使其不破坏动态响应的直流母线电压。通过仿真和实验结果有效地证明了本文所提出的新型控制技术。






暂无评论