伺服控制是为满足某种目的,产生运动和对物体运动进行控制是我们人类最重要的活动之一。伺服控制是对物体运动的位置、速度及加速度等变化量的有效控制。
有关“伺服控制”的最新话题,搜索887 次
2025中国(秋季)电机产业链交流会在深圳成功举办,超800位行业精英齐聚,共探电机驱动、伺服控制与智能汽车电机等有关半导体的前沿技术,推动产业链协同创新。
10月24日深圳将举办中国电机智造与创新应用秋季交流会,设立电机驱动、伺服控制与汽车电机三大论坛,汇聚专家与企业代表,探讨前沿技术、展示创新产品,并举办供需对接与颁奖活动,共拓智能电机新发展。
5月23日,杭州!2025中国电机智造与创新应用暨电机产业链交流会(华东)启幕,聚焦伺服控制、机器人关节驱动等前沿领域,呈现全链条技术视角。
2025中国电机智造与创新应用暨电机产业链交流会(春季)成功举办,聚焦电机驱动、电控方案、伺服控制及机器人应用等热点话题,吸引众多产业链上下游知名企业与技术专家共聚一堂,深入探讨电机行业的创新方向与发展路径。
极海发布首款基于Arm® Cortex®-M52双核架构的实时控制MCU——G32R501,赋能光伏/储能逆变器、充电桩电源模块、服务器电源、车载OBC、UPS、伺服控制器、机器人等领域。
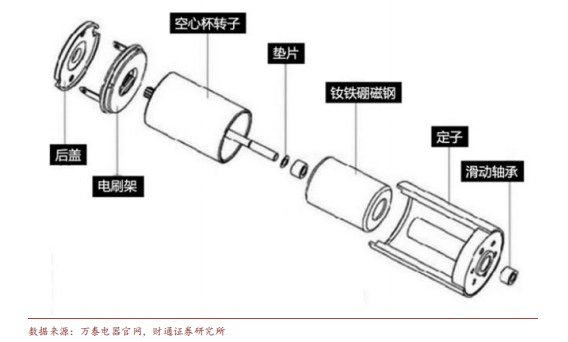
作为一种采用无铁芯转子的直流永磁伺服控制电机,空心杯电机具有体积小、功率密度大、控制特性良好等特点,在人形机器人灵巧手或将取得大量应用。
电流传感器是伺服控制必不可少的一部分,小功率系统可采用霍尔电流传感器。通过ADC将模拟信号转换成数字信号,然后参于数字伺服控制。本文主要介绍一款集成型霍尔电流传感器MLX91210在伺服系统中的应用要点及案例分析
本文根据矢量控制和svpwm调制原理,建立了仿真模型,并对仿真中的关键问题和仿真结果进行了分析。
精度是机床必须保证的一项性能指标。位置伺服控制系统的位置精度在很大程度上决定了数控机床的加工精度。因此位置精度是一个极为重要的指标。
首先介绍了永磁同步电机伺服控制器的基本功能及控制原理,并以STM32F407为基础进行了小功率的伺服控制器设计,详细讲述了伺服控制器的软、硬件的具体设计流程及其实现方式。并通过意法半导体公司提供的相关软件设计工具快速、有效地完成伺服控制器的设计、调试。