



双Buck太阳能LED路灯照明控制系统设计方案
摘要: 本文研制的基于STC12C5410AD的双Buck太阳能照明控制器,可实时采集太阳能电池板电压,能够正常准确地检测出白天、黑夜,利用自举芯片IR2104实现同步Buck,采用最大功率点和浮充两种方式对蓄电池进行充电,并对蓄电池进行管理,以防止过充和过放,LED路灯恒流输出,系统已经正常工作了2个月。虽然防反充二极管选用的是肖特基二极管,但是,损耗还是比较大的。今后将采取一些措施减小防反充二极管的损耗,进一步提高充电效率。
太阳能作为一种取之不尽、用之不竭的无污染的洁净能源,已被公认为未来解决能源危机的最有效能源。LED灯具有寿命长、高效节能、环保等优势。因此,把太阳能与LED路灯有机地结合在一起,开发出太阳能LED灯照明控制器非常重要。目前市场上很多太阳能控制器,都是采用直充方式充电,没有对蓄电池进行管理控制,导致能源利用率不高,可靠性不强。本文所设计的基于STC12C5410AD的双Buck照明控制器,采用最大功率点充电,充分利用太阳能电池板的能量,对蓄电池进行浮充充电,防止蓄电池假充满的现象;对LED路灯采用二段式的恒流控制,以增强LED灯的使用寿命,实现了一种环保节能的照明模式,解决了市场上一些太阳能控制器的缺陷,是一种性价较高的产品。
1 系统原理
双Buck太阳能LED路灯照明控制系统原理图如图1所示。系统包括:太阳能电池、电压电流采集模块、同步Buck模块、蓄电池、LED路灯和STC智能控制器。太阳能电池组件为系统提供能源,通过采集太阳能电池板上的电压来判别是白天、黑夜,当检测电池板的电压高于一定值时,进入白天模式,此时:STC智能控制器通过所采集的太阳能电池板两端的电压和充电电流,控制同步Buck工作,实现对蓄电池的MPPT(Maximum Power Point Tracking)充电,当蓄电池的电压达到一定值时,进入浮充充电模式,实时采集蓄电池两端的电压,防止蓄电池过充、过放;当检测电池板的电压小于一定值时,进入黑夜模式,此时:打开并控制后级同步Buck电路,实现对LED路灯的恒流控制。
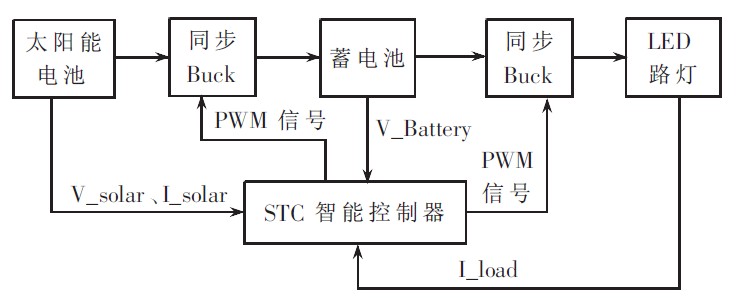
图1 系统原理图
本文研制的路灯照明控制系统主要应用场合是针对户外或者景观区地带。灯具选用单个1 W 的LED,6个并联、3 个串联组成一个18 W 的LED 路灯, 日工作10 个小时, 前5 个小时全功率(P 全=18 W) 工作, 后5 个小时半功率(P半=9W) 工作。福州地区峰值日照时数为t 峰=3.458 887 8 h ( 本系统选用3.5 h) , 假设路灯系统需要保持的连续阴雨天数d 为7 天, 两个连续阴雨天之间的间隔数d 间为7 天, 蓄电池放电效率η 放为90%, 蓄电池放电深度D 为0.75, 这时蓄电池的容量W蓄为:
W蓄=(t 全×P 全+t 半×P 半)÷η放÷D×d=(5 h×18 W+5 h×9 W)÷90%÷0.75×7=1400 Wh.
所以选择12 V、120 Ah 的铅酸蓄电池。设蓄电池充电效率η 充为85%, 则蓄电池单日所需的充电量W1为:
W1=(t 全×P 全+t 半×P 半) ÷η 放×(d 间+d)/d 间=(5 h×18 W+5 h×9 W)÷90%×(7+7)/7=300 Wh.
设太阳能电池板的峰值功率为W太, 太阳能电池组件系统综合损失系数为1.1 , 则:
W太×η 充×t 峰=W1×1.1.
W太×85%×3.5 h=300 Wh×1.1.
得W太=110.9 W, 所以选择了一块峰值功率为115 W 的太阳能电池板。
2 系统硬件设计
2.1 充电控制
2.1.1 Buck电路
太阳能最大功率点跟踪控制所需的DC-DC模块包括:Buck、Boost、Boost-Buck、Cuk等拓扑方式,通过对四种电路方案的比较,本文选用Buck电路。
为追踪太阳能最大功率点实现最大能量利用,前级的DC-DC电路曾采用四种Buck驱动方案:利用PMOS做Buck;独立电源加光耦;基于IR2110的Buck电路;基于IR2104的同步Buck电路。对四种驱动方案进行了比较分析:PMOS由于导通阻抗较大,PMOS发热严重,工作效率低,只适用于电压值比较低、工作效率要求不高的场合;独立电源加光耦,需要制作一个独立电源来隔离光耦两边的地;使用IR2110高压自举芯片做驱动,必须严格遵守工作所需的条件,需加电阻放掉Buck后级储能滤波电容中的电,才能正常启动;基于IR2110的Buck电路,防反充二极管须加在Buck电路输出端,在电流比较小的情况下,工作尚可;当电流较大时,Buck电路中续流二极管的消耗就会增加。为了减小续流二极管的损耗,最后选择了基于IR2104的同步Buck电路,其电路原理图如图2所示。
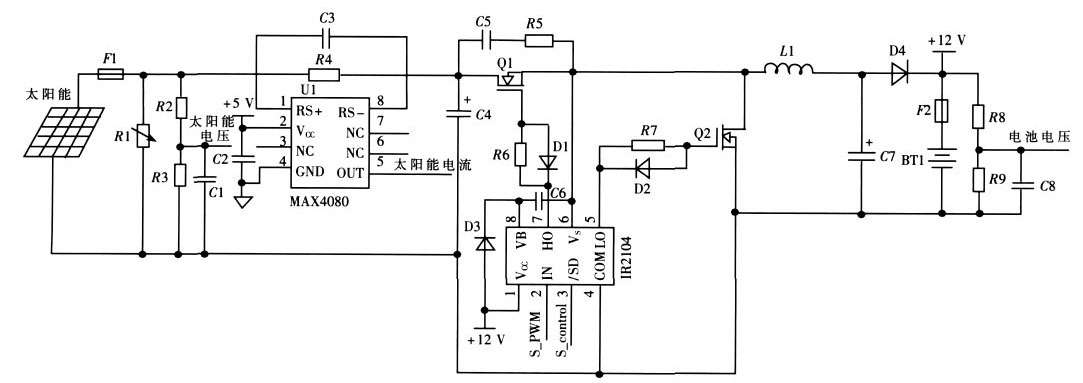
图2 基于IR2104的同步Buck太阳能充电电路
IR2104芯片内部已经接有下拉电阻到地,其控制端/SD,当系统未开启工作时,/SD置零,防止开关管误操作损害开关管和芯片;当系统正常工作时,/SD置1,使能IR2104.IN是PWM信号输入端,LO是低端MOS管驱动输出,HO是高端MOS管驱动输出。IR2104高端利用自举电路的原理提供高压悬浮驱动,VCC由12 V铅酸蓄电池直接提供,通过自举二极管和自举电容,周期性地充放电,达到自举的目的。IR2104最大工作电压可达到600 V,死区时间为520 ns,是同步Buck电路MOS管驱动的一种可行性方案,能大大提高DC-DC转换效率。采用同步Buck电路,在后级接一个防倒灌二极管给蓄电池充电,其工作良好。
2.1.2 电流、电压采集电路
太阳能充电电流采集采用0.03 Ω的采样电阻进行采样,并选取MAX4080TASA芯片进行电压放大,放大倍数为20倍,可检测到的最大电流达到8.3 A.电压采集采用电阻分压降压的采集方法。模数地加磁珠分离,以减小模拟地对系统的干扰。采集上来的数据通过射随跟随器跟随,以提高所采集数据的精确度。
2.1.3 防雷电路
采用双层防雷保护措施,选取压敏电阻接大地和控制前级Buck电路使能端共同作用。当没有雷电时,压敏电阻阻值比较大;当有雷电时,压敏电阻阻值变小,高压脉冲通过压敏电阻到地,把能量通过大地流走。当系统检测到太阳电池板的电压降到一定值时,就把IR2104的控制端置零,使Buck停止工作,保护后级电路不受雷电的影响。
2.2 放电控制
LED路灯的驱动同样采用同步Buck电路,其驱动控制电路如图3所示,通过检测采集上来的电流信号,STC单片机控制PWM信号输出,实现恒流控制。采用同步Buck转换效率可高达95%,容易实现全功率、半功率及各个功率的输出控制。负载LED的电流采集采用MAX4080TASA,数字地和模拟地通过磁珠隔离,尽量减小地的干扰,能够实现较好地恒流控制。
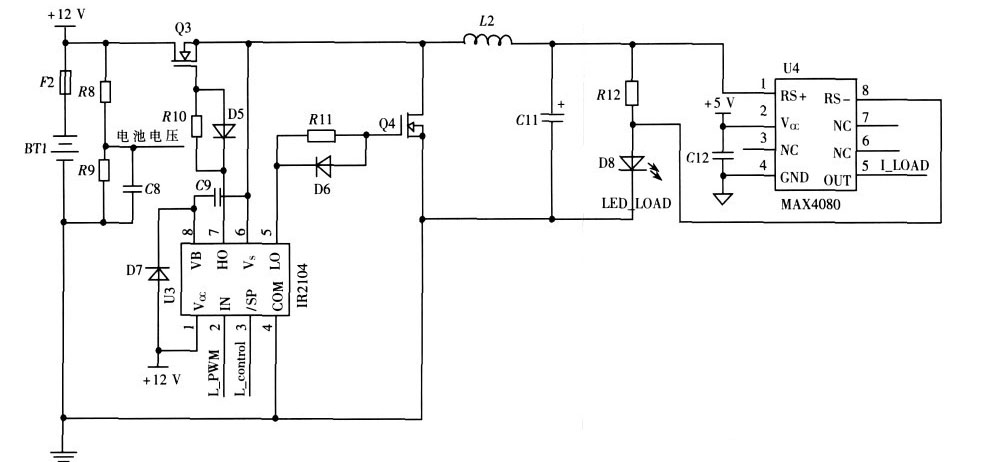
图3 LED同步Buck电路
3 系统软件设计
系统软件流程图如图4所示。STC12C5410AD单片机内部集成4路PWM发生器和8路10 bit的A/D转换器,可直接实现PWM输出和A/D转换。系统实时采集太阳能电池板和蓄电池两端电压,当检测到太阳能电池板的电压大于6 V(6 V是设定的白天标志值)时,延时3 min,在3 min内实时监测电池板电压,若3 min后电池板电压仍大于6 V,则进入充电模式:(1)关闭路灯,采集蓄电池电压,当蓄电池两端的电压小于14.7 V时,使能前级Buck电路控制端,采集电压电流信号,控制单片机调制PWM输出,采用双向扰动法实现最大功率点充电。(2)当采集的电流小于0.2 A时,进入固定电压法充电模式,把太阳能电池板的电压输出稳在28 V~32 V之间(选择端电压为40 V的太阳能板);(3)当蓄电池电压上升到14.7 V时,转为浮充充电模式,蓄电池浮充电压设为13.6 V~13.8 V.当电池板的电压降到6 V时,置零前级的Buck电路控制端延时3 min,3 min内实时监测电池板电压。如果3 min后采集上来的电压值还是小于6 V,则进入放电模式:使能后级Buck电路控制端,这时路灯点亮,全功率放电,延时5个小时后进入半功率放电模式,系统时刻监测天亮,天亮或延时5个小时结束,则路灯关闭。系统实时采集蓄电池电压,可以保证过充和过放保护,防止蓄电池损害,实现无人值守工作。
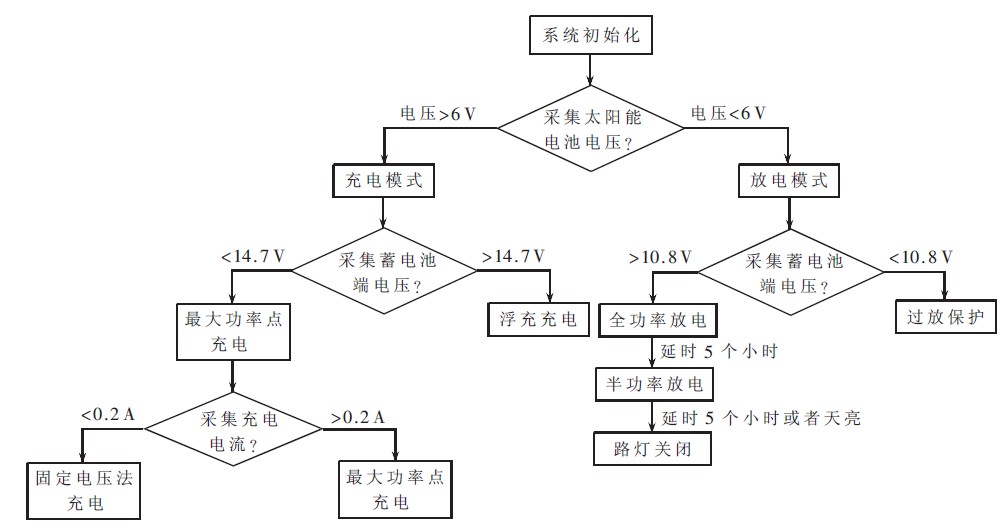
图4 软件流程图
4 实验结果
系统前级同步Buck电路双MOS管的驱动波形如图5所示。由图可以看出,采用IR2104做同步驱动的波形效果还是较好的,添加电阻限流和二极管加速MOS管结电容的放电,进一步降低了开关损耗,提高了效率。A为Q1管驱动波形图,B为Q2管驱动波形图,由于示波器的两个探头内部是相连的,所以图中A和B波形图都是相对于模拟地的。从图中可以看出,两种MOS管的驱动波形能得到很好的互补,能较好地控制同步Buck工作,实现最大功率点跟踪。
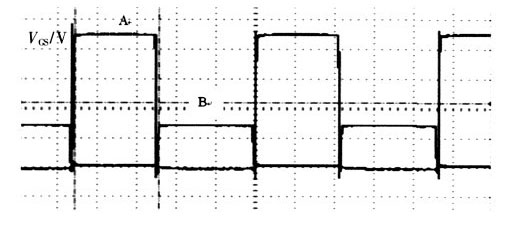
图5 前级同步Buck驱动波形
后级同步Buck电路中双MOS管Q3、Q4的驱动波形如图6所示。通过调节占空比可以调节LED的功率。为了合理利用蓄电池中的能量,LED驱动采用恒流驱动方式,全功率为控制PWM波实现2 A恒流输出,半功率控制PWM波实现1 A恒流LED驱动,通过软件调节各个时刻的输出功率。对基于IR2104的同步Buck电路LED驱动方案进行测试发现:当工作频率为20 kHz、输出占空比为90%的PWM波时,蓄电池电压为11.94 V,放电电流为1.777 A,LED两端电压为10.199 V,LED灯供电电流为1.977 A,效率高达95.03%.因此可以看出,这是LED恒流驱动的一种可行性方案。
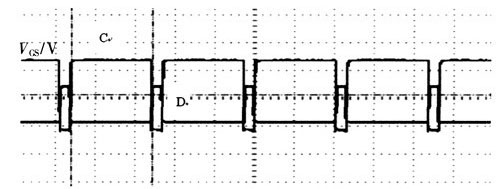
图6 后级同步Buck驱动波形
本文研制的基于STC12C5410AD的双Buck太阳能照明控制器,可实时采集太阳能电池板电压,能够正常准确地检测出白天、黑夜,利用自举芯片IR2104实现同步Buck,采用最大功率点和浮充两种方式对蓄电池进行充电,并对蓄电池进行管理,以防止过充和过放,LED路灯恒流输出,系统已经正常工作了2个月。虽然防反充二极管选用的是肖特基二极管,但是,损耗还是比较大的。今后将采取一些措施减小防反充二极管的损耗,进一步提高充电效率。






暂无评论