有关“控制算法”的最新话题,搜索8 次
AM13E230x MCU过在单个器件中结合使用Arm® Cortex®-M33 CPU和TI TinyEngine™ NPU,能够在实时控制应用中实现预测性故障检测和自适应控制算法。人形机器人和电器设备中的本地AI模型可以根据实际情况持续监测参数并调整性能,而无需云连接或其他分立式元件。
基于高集成度 G32M3101 电机控制 SoC开发的浴霸风机,主控芯片搭载 Arm® Cortex®-M0+ 内核,主频达 64MHz,并配置 64KB Flash 与 8KB SRAM。应用采用无感FOC矢量控制算法,利用PID控制器对参考速度和实际速度进行闭环调节,输出电流向量大小,通过估算器实现对转子位置及速度的精准获取。
精确测量电机电流对于实现人形机器人安全高效运行非常重要。这些测量结果由机器人关节中致动器的控制算法使用,用于实现精确的移动和动态性能。
在技术更新推动下,半导体行业在材料、设计、制造和封装等领域不断推陈出新,以满足AI和高性能计算的需求。 本周新品速览:涵盖MCU、系统级芯片、控制算法平台等半导体重点领域。
随着各应用领域对电机驱动控制器的需求越来越大,电机驱动控制器市场竞争激烈,对半导体器件的产品质量、供应服务等都提出了不同要求。当前,控制算法硬件化持续发展,但其有着怎样的市场优势?又有怎样的发展局限?未来电机驱动控制器的发展趋势会是如何?不妨就这期《对话》一探究竟。
伺服电机可以在一定范围内精确控制电机的位置和转速,基本上是无级变速,简化了传动系统。伺服驱动器采用数字信号处理器(DSP)作为控制核心,可以实现比较复杂的控制算法,实现数字化、网络化和智能化。能够精确的控制电机的转动,从而实现精确的定位。
随着电动工具市场的深入发展,锂电电动工具的续航问题,MCU的性能要求以及FOC控制算法和物联网技术应用又呈现出哪些市场需求?
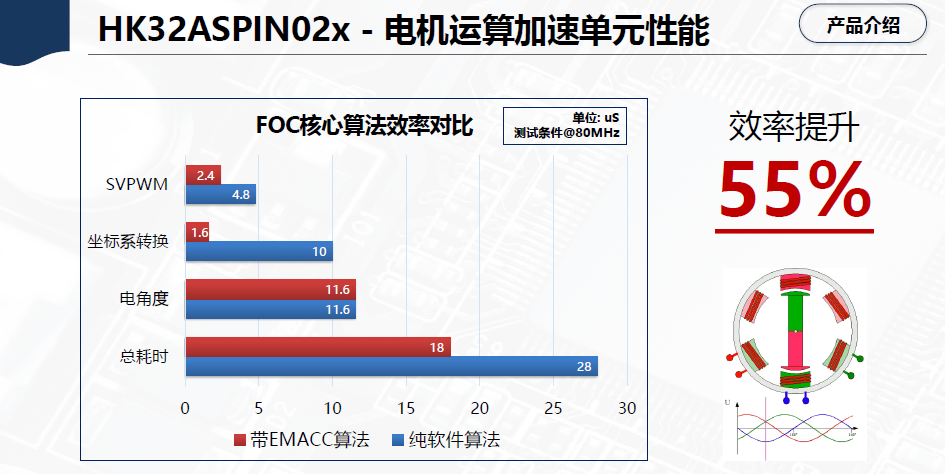
电机控制算法FOC硬件化目的是加速算法执行效率,减少CPU算力耗时,有利于缩短客户开发周期和降低客户使用上的难度,进而提高产品易用性和竞争力,国内芯片原厂已经有不少厂商走上了软件算法硬件化之路,但是硬件化势必给客户带来灵活度不足等缺点。
实时确定性以太网协议(例如EtherCAT)已经能够支持多轴运动控制系统的同步运行。 1 该同步包含两方面含义。首先,各个控制节点之间的命令和指令的传递必须与一个公共时钟同步;其次,控制算法和反馈函数的执行必须与同一个时钟同步。
为了响应绿色环保,节约能耗,降低噪音,直流变频调速发展越来越普及,调速的性能也不断地提高。矢量控制理论经过几十年的发展,技术也比较成熟。为此东芝开发了基于ARM Cortex—M3内核的M370系列微处理器,该系列微处理器主要用于电机控制,内置了硬件矢量引擎VE,矢量控制算法由硬件实现。